Sigmund Hennum Høeg

I’m a Ph.D. graduate at the Robotics and Engineering Design Group at the Norwegian University of Science and Technology (NTNU), where I focus on applying learning methods to robotic planning and control.
Research Interests
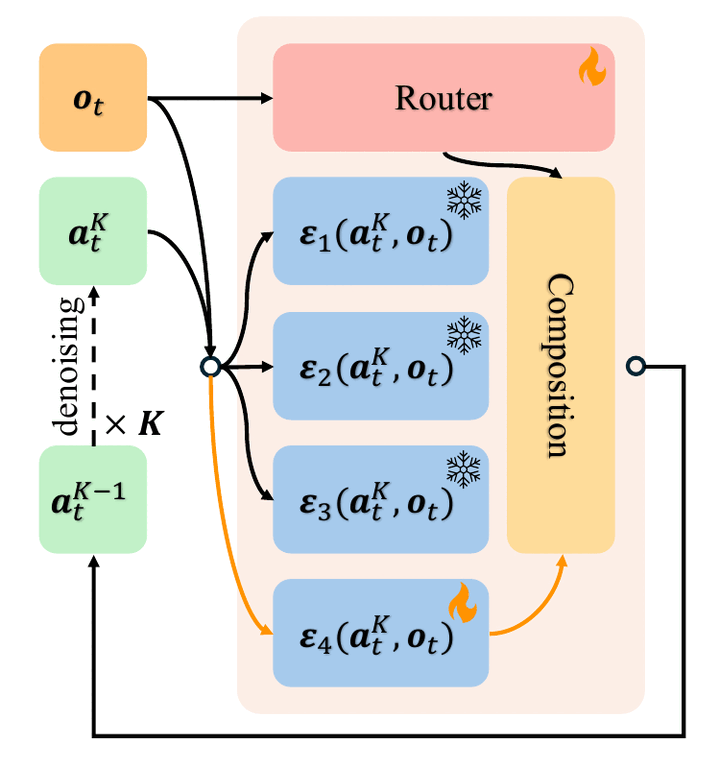
My research centers around Imitation Learning, specifically the use of Flow- and Diffusion Models for robotic planning and control. While these methods are powerful out of the box, important and interesting challenges arise when we apply these models to robots. I’ve worked on models that enhance prediction speed and enable more complex, long-horizon planning.
My most recent work includes:
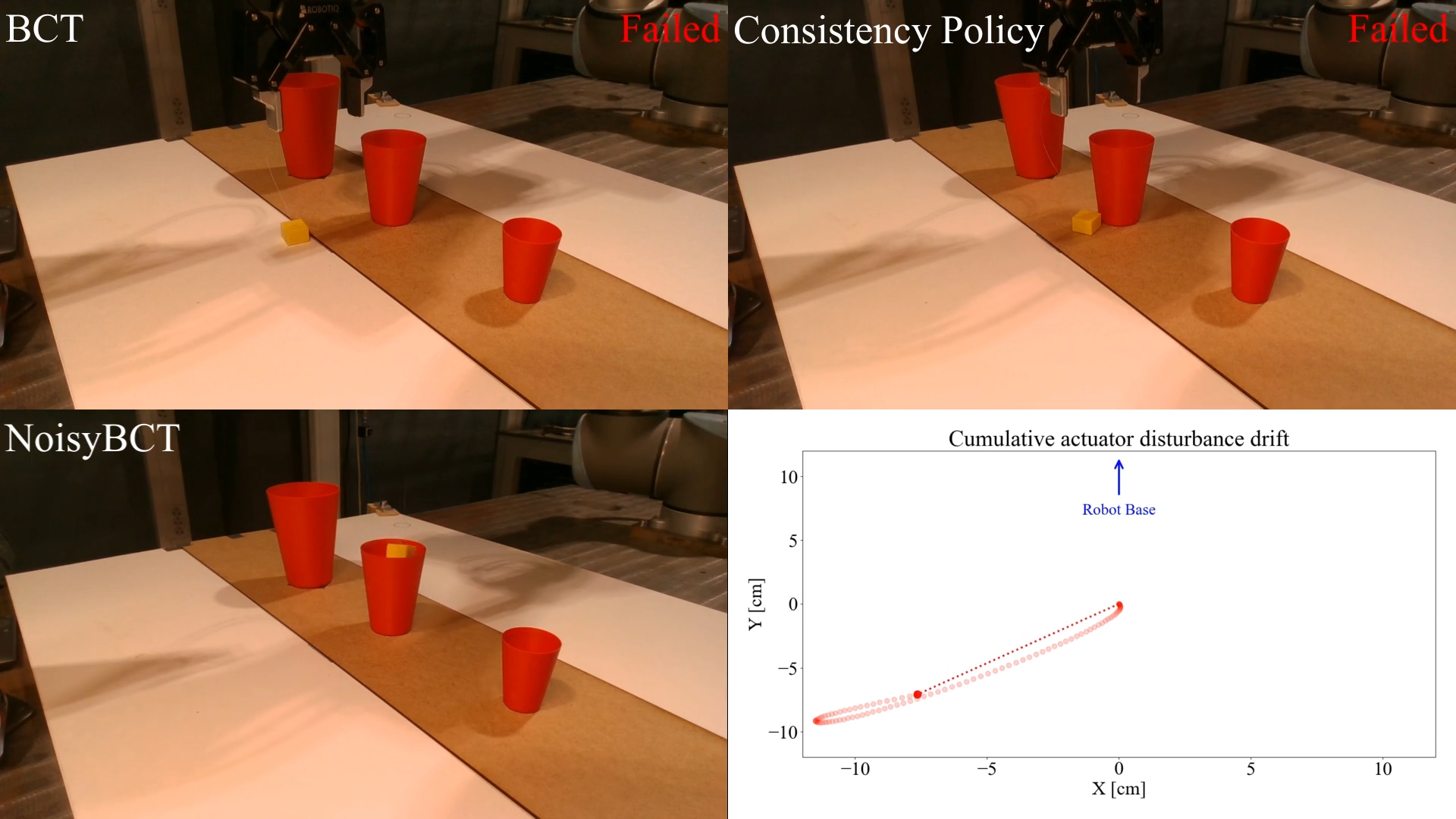
- Streaming Diffusion Policy (ICRA 2025): A novel inference paradigm for diffusion-based policies for robotic visuomotor control.
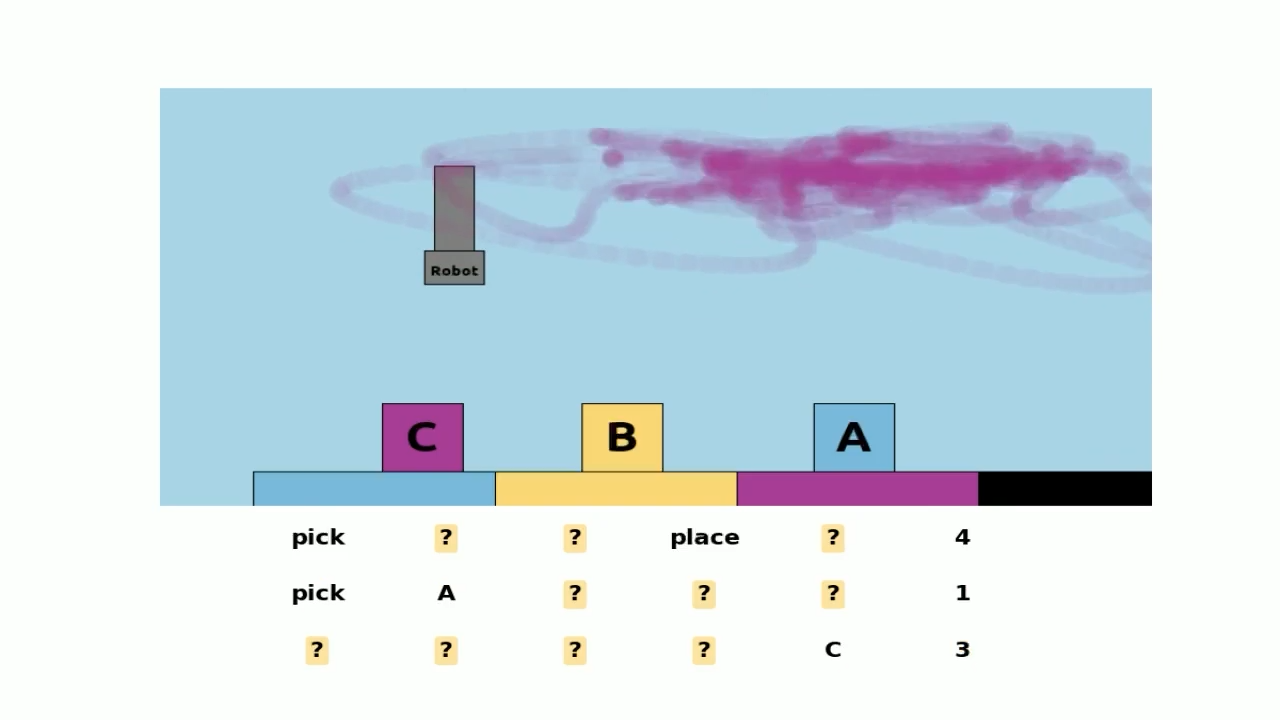
- Hybrid Diffusion Planning (Under review): A diffusion-based planner that achieves significantly higher success rates on long-horizon tasks than baselines by concurrently constructing a high-level symbolic plan.
In addition, I have collaborated on several other research projects. I’m currently finishing my Ph.d. thesis, so if my experience seems interesting, please reach out to me!
Background
I completed my master’s degree at NTNU, where I also had the opportunity to include an academic exchange at ETH Zürich. I have completed coursework in Machine Learning, Robotics, and Computer Vision. My master’s thesis focused on Reinforcement Learning methods for robotic grasping, comparing different algorithms and discussing the challenges of applying RL to robotic manipulation tasks.